組織
研究開発項目4:CA協調連携の研究開発 活動報告
メンバー
- グループリーダー
-
- 谷口 忠大(京都大学)
生活物理支援CAの研究開発
- 谷口 忠大(京都大学)
- 課題推進者
-
- 中村 友昭(電気通信大学)
階層的CA制御の研究開発 - 杉浦 孔明(慶應義塾大学)
生活環境対話技術の研究開発 - 堀井 隆斗(大阪大学)
自在CA制御技術の基盤研究開発 - 鈴木 陽介(金沢大学)
CA触覚マニピュレーションの研究開発 - 平田 雅之(大阪大学)
侵襲型BMIとCAの調和制御の研究開発
- 中村 友昭(電気通信大学)
概要
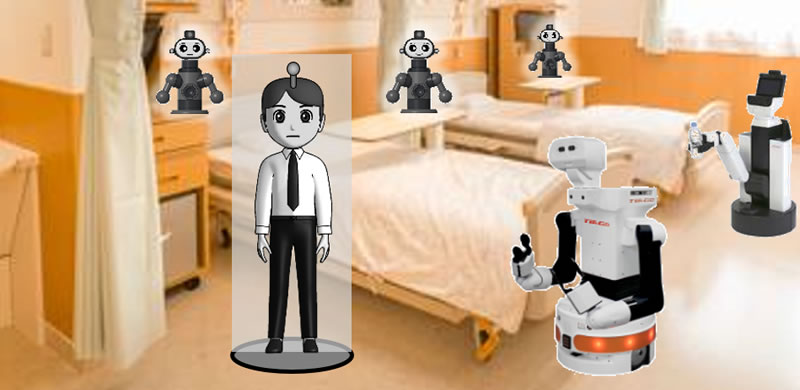
本研究開発項目では、複数CAの同時遠隔操作・連携制御技術を研究開発する。
1人の操作者が同時に複数のCAを操作するには、タスクや環境に応じて、操作者の意図を理解しながら働く複数のCAを利用する技術が必要となる。例えば、治療準備、検査、処置、説明等の連携作業が頻繁に発生する病室では、CAは単独で行動するのではなく、複数体で連携して行動することで、より効率的に病室内作業を達成できるようになる。このように、CA間の連携により、1体のCAではできない多様なサービスを実現する。
この研究開発項目は、研究開発項目5と密に連携する。
目標
複数CAの同時遠隔操作・連携制御機能を実現する。
その機能の検証のために、研究室内に仮想的な生活環境や病室環境を再現し、実際に複数のCAを連携動作させて、効率良く作業ができるかどうか、実証実験を行う。作業効率は、作業の達成度やそれに要した時間等で評価する。