Members
- Group1: Development of a CA which has a humanlike presence and a lifelikeness
- Group2: Research and development on unconstrained spoken dialogue
- Group3: Human level knowledge and concept acquisition
- Group4: Cooperative control of multiple CAs
- Group5: Development of CA platform
- Group6: Multidisciplinary investigation on how avatars and devices affect users
- Group7: Field experiments in the real world
- Group8: Avatar social ethics design
Group4: Cooperative control of multiple CAs Activities
Members
- Group leader
-
- Tadahiro TANIGUCHI (Ritsumeikan University)
Research and development of Daily-Physical-Support CAs
- Tadahiro TANIGUCHI (Ritsumeikan University)
- Principal investigator
-
- Tomoaki NAKAMURA (The University of Electro-Communications)
Hierarchical control for autonomous mobile robots - Komei SUGIURA (Keio University)
Research and development of Embodied Dialogue CAs - Takato HORII (Osaka University)
Development of flexible CA control technologies - Yosuke SUZUKI (Kanazawa University)
Tactile sensing and control for CA manipulation - Masayuki HIRATA (Osaka University)
CA control based on invasive BMIs
- Tomoaki NAKAMURA (The University of Electro-Communications)
Overview
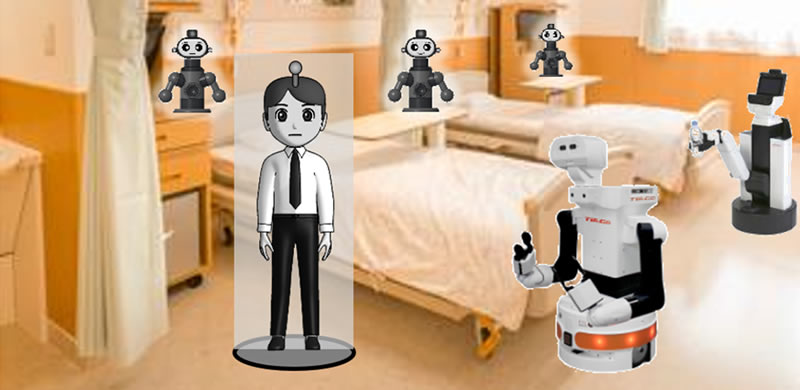
We will research and develop a technology that can remotely control multiple CAs simultaneously and enable cooperative control between them.
In order for one operator to operate multiple CAs at the same time, it is necessary to have the technology which facilitates the use of multiple CAs that can operate with an understanding of the operator's intentions, which depend on the task and environment. For example, in a hospital room where coordinated tasks such as treatment preparation, examination, treatment, explanation, etc. frequently occur, CAs have to accomplish their tasks in the room more efficiently by working together with multiple bodies instead of acting alone. In this way, collaboration among multiple CAs will realize a variety of services that cannot be provided by a single CA. Our work will proceed in close connection with Group 5.
Goal
Our goal is to realize a function for simultaneous remote operation and coordinated control of multiple CAs. To verify this function, we will virtually reproduce the living environment and hospital room environment in the laboratory, and empirically test whether the CAs can work efficiently by actually operating multiple CAs in coordination. The work efficiency will be evaluated by the degree of accomplishment of the work and the time required for it.