Members
- Group1: Development of a CA which has a humanlike presence and a lifelikeness
- Group2: Research and development on unconstrained spoken dialogue
- Group3: Human level knowledge and concept acquisition
- Group4: Cooperative control of multiple CAs
- Group5: Development of CA platform
- Group6: Multidisciplinary investigation on how avatars and devices affect users
- Group7: Field experiments in the real world
- Group8: Avatar social ethics design
Group1: Development of a CA which has a humanlike presence and a lifelikeness Activities
Members
- Group leader
-
- Hiroshi ISHIGURO (Osaka University)
Development of a CA which has a humanlike presence and a semi-autonomous intelligent interface
- Hiroshi ISHIGURO (Osaka University)
- Principal investigator
-
- Kohei OGAWA (Nagoya University)
Research on the cognitive aspects of a high presence tele-operation interface - Yoshihiro NAKATA (The University of Electro-Communications)
Research and development of a mobile humanoid CA - Masahiro SHIOMI (ATR)
Development of a Huggable CA - Yuichiro YOSHIKAWA (Osaka University)
Development of life-like CA and mechanisms for collaborative conversation - Takashi MINATO (RIKEN)
A study on generating natural CA motion without being aware of tele-operation - Yutaka NAKAMURA (RIKEN)
Development of an interaction behavior learning method for CAs
- Kohei OGAWA (Nagoya University)
Overview
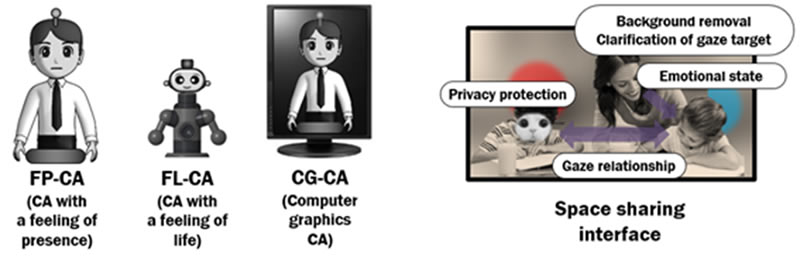
Our work will be on the development of robots and CGs which have a humanlike presence and lifelikeness for use as CAs. We will also research and develop a space-sharing interface that can be used for this purpose.
Since human perceptual behavior is adapted to three-dimensional space, it is difficult to deepen discussion and empathy with current videoconferencing systems. Therefore, it is necessary to develop robots or CGs that can be used as naturally as the operator's own body, with humanlike presence and lifelikeness for use as CAs. We will develop a human-type mobile CA and a hugging CA as extensions of a CA which has a humanlike presence and lifelikeness. These will feature space sharing interface technology that allows the operator to feel as if he or she is present. This space-sharing interface technology will require the development of a function that allows for the presentation of information on the screen that cannot be conveyed by web conferencing tools (Zoom, Webex, etc.). Finally, our work will proceed in close connection with other Groups.
Goal
We will create CAs composed of robots and CGs which have a humanlike presence and lifelikeness (humanlike presence CAs, life-like CAs), and space-sharing interfaces to utilize them. We will evaluate whether the humanlike presence CA has a sense of presence as a human individual for one's interlocutor, using psychological and cognitive and neuroscience methods (e.g., measurement of the interlocutor's response behavior and brain activity) and empirical experiments. The life-like CA will be evaluated by psychological evaluation methods (reflective behavior of the interlocutor and questionnaires) and comparison experiments with animals to ascertain if it can aleviate loneliness without violating privacy. The space-sharing interface will be evaluated by psychological methods (based on the response of the interlocutor) and empirical experiments to ascertain if the conversational behavior, mutual gaze behaviour, and synchronization behavior occur in the same way as they do in real life.